Emulation
Emulation is a bit of a loaded term, unfortunately. Most of the confusion deals with the scope of the emulated target. Do you just need to step through a few instructions, or a whole function? Do you need to include external modules? Do you need to simulate system calls? Do you need to simulate connected devices? Most of Ghidra’s GUI-accessible emulation features focus on the smaller scope, though it does provide programming interfaces for advanced users to extend that scope. Those more advanced features are covered in Modeling.
This module assumes you have completed the Beginner portion of this course.
P-code Emulation and Caveats
Ghidra’s emulator uses the same p-code as is used by the decompiler. P-code describes the semantics of each instruction by constructing a sequence of p-code operations. The p-code specifications for most of Ghidra’s languages were designed with decompilation, not necessarily emulation, in mind. While in most cases, p-code for decompilation suffices for emulation, there are cases where design decisions were made, e.g., to keep decompiler output simple, that makes them less suitable for emulation. This may manifest, e.g., in an excess of user-defined p-code ops, or userops. The Modeling module discusses ways to implement or stub those userops in the emulator. Some processor modules provide those stubs “out of the box.” If the emulator ever halts with an “unimplemented userop” message, then you have run into this problem.
Use Cases
As already hinted at the start of this module, there are several use cases for emulation, and Ghidra tries to meet these cases by integrating emulation into the Debugger UI. Some of the use cases accessible from the UI are:
- Extrapolation and interpolation of a live target.
- Emulation of a program image.
- P-code semantics debugging.
We will explore each case with a tutorial and exercise.
Extrapolation and Interpolation
This is perhaps the easiest use case, assuming you already have started a live session. Extrapolation is predicting execution of the target into the future, without allowing the actual target to execute. Instead, we will allow an emulator to step forward, while reading its initial state from the live target. This allows you, e.g., to experiment with various patches, or to force execution down a certain path. If you devise a patch, you can then apply it the live target and allow it to execute for real. Interpolation is similar, but from a snapshot that is in the past. It can help answer the question, “How did I get here?” It is more limited, because missing state for snapshots in the past cannot be recovered.
In this tutorial, we will examine the command-line argument parser in
termmines.
- Launch
termminesusing GDB in the Ghidra Debugger. - If you have not already, do a bit of static analysis to identify the
argument parsing function. It should be the first function called by
main. - Use a breakpoint to interrupt the live target when it enters this function.
- Change the Control mode drop-down to Control Emulator.
- Click
 Step Into to step the emulator forward.
Step Into to step the emulator forward. - Click
 Skip Over and
Skip Over and  Step Back to experiment with
different execution paths.
Step Back to experiment with
different execution paths.
About those two new actions:
-
Skip Over: Step the current thread by skipping one
instruction.
-
Step Back: Step the current thread backward one
instruction, or undo an emulated skip or patch.
Quick Exercise: Try to get the program counter onto
the call to exit(-1) using only those three step
buttons.
You should see things behave more or less the same as they would if it were the live target. The main exception is the Terminal window. It always displays the state of the live target, as it is unaware of the emulator. You can make changes to the emulator’s machine state, set breakpoints, etc., just as you would in Control Target mode. NOTE: You may see Ghidra interact with the target, despite being in Control Emulator mode, because Ghidra lazily initializes the emulator’s state. If the emulated target reads a variable that Ghidra has not yet captured into the current snapshot, Ghidra will read that variable from the live target, capture it, and provide its value to the emulator.
Stepping Schedules
If you had not noticed before, the trace tabs include the current snapshot number. If you have stepped in the emulator, it will also contain the sequence of steps emulated. Recall the time element of the Debugger’s coordinates. (See the Navigation module if you need a refresher.) The time element, called the schedule, consists of both the current snapshot and the sequence of steps to emulate. The tab displays that schedule. If you have done any patching of the emulator’s state, you may notice some more complicated “steps” in the schedule. The syntax is:
- Schedule → Snapshot [
:[ Step (;Step ) * ] [.Step (;Step ) * ] ] - Step → [
tId-] ( Tick | Skip | Patch ) - Tick → Count
- Skip →
sCount - Patch →
{SleighStmt}
In essence, the schedule is the starting snapshot, followed by zero
or more machine-instruction steps followed by zero or more
p-code-operation steps. Each step is optionally preceded by a thread id.
If omitted, the thread id is the same as the previous step. If the first
step has no thread id, it applies to the snapshot’s event thread. A
plain number indicates the number of instructions or operations to
execute. An s prefix indicates skip instead of execute.
Curly braces specify a patch using a single Sleigh statement. Here are
some examples:
0— The first snapshot in the trace.3— Snapshot number 3.3:10— Emulate 10 machine instructions on the event thread, starting at snapshot 3.3:t1-10— Same as above, but on the second thread rather than the event thread.3:10;t1-10— Start at snapshot 3. Step the event thread 10 instructions. Step the second thread 10 instructions.3:10.4— Start at snapshot 3. Step the event thread 10 instructions then 4 p-code ops.3:{RAX=0x1234};10— Start at snapshot 3. Override RAX with 0x1234, then step 10 instructions.
The explication of schedules allows Ghidra to cache emulated machine
states and manage its emulators internally. You can have Ghidra recall
or generate the machine state for any schedule by pressing
CTRL-G or using
Debugger → Go To Time in the menus.
Assuming you got the program counter onto exit(-1)
earlier:
- Write down the current schedule.
- Change back to Control Target mode. Ghidra will navigate back to the current snapshot, so PC will match the live target.
- Change back (again) to Control Emulator mode.
- Press
CTRL-Gand type or paste the schedule in, and click OK. The program counter should be restored toexit(-1).
NOTE: The thread IDs used in schedules are internal to the current trace database. Most likely, they do not correspond to the thread IDs assigned by the back-end debugger.
Exercise: Demonstrate the Cell Numbers
The board setup routine in termmines first places mines
randomly and then, for each empty cell, counts the number of neighboring
cells with mines. In this exercise, you will use extrapolation to
experiment and devise a patch to demonstrate all possible counts of
neighboring mines:
- Launch
termminesusing GDB with Inferior TTY enabled. - Use a breakpoint to trap it at the point where it has placed mines,
but before it has counted the neighboring cells with mines. (Use
SHIFT-Rintermminesto reset the game.) - Use the emulator to extrapolate forward and begin understanding how the algorithm works.
- Move the mines by patching the board to demonstrate every number of neighboring mines. That is, when the board is revealed at the end of the game, all the numbers 1 through 8 should appear somewhere.
- Use extrapolation to debug and test your patch.
- Once you have devised your patch, apply it to the live target. (Copy-Paste is probably the easiest way to transfer the state from emulator to target.)
Emulating a Program Image
This use case allows you to load “any” Ghidra program database into
the emulator, without a back-end debugger, host environment, or other
dependencies. The result and efficacy of this method depends greatly on
what is captured in the program database. When Ghidra imports an ELF
file, it simulates the OS’s loader, but only to a degree: It places each
section at its load memory address, it applies relocation fixups, etc.
The resulting program database is suitable for emulating that image, but
in relative isolation. It is probably not possible to load a library
module into that same database nor into the same emulator and expect
proper linkage. Ghidra’s loaders often “fix up” references to external
symbols by allocating a special EXTERNAL block, and placing
the external symbols there. There is (currently) no means to re-fix up.
If, however, you import a firmware image for an embedded device, or a
memory dump of a process, then the image may already have all the code
and linkage necessary.
It is too tedious to categorize every possible situation and failure mode here. When you encounter an error, you should diagnose it with particular attention to the contents of your program image, and how it expects to interact with its environment: the host system, connected hardware, etc. The UI has some facilities to stub out dependencies, but if you find yourself creating and applying an extensive suite of stubs, you may want to consider Modeling. This allows you to code your stubs into a library, facilitating re-use and repeatability.
Emulation need not start at the image’s designated entry point. In this tutorial, we will examine the command-line argument parsing routine.
- Ensure you have no active targets in the Debugger, but have
termminesopen in the Static listing. - Go to the entry of the command-line argument parsing function.
- Right-click its first instruction and select Emulate Program in New Trace.
This will map the program into a new trace. Technically, it is not actually loaded into an emulator, yet, because Ghidra allocates and caches emulators as needed. Instead, what you have is a single-snapshot trace without a live target. The initial state is snapshot 0, and emulation is started by navigating to a schedule, just like in extrapolation.
Because we can easily step back and forth as well as navigate to
arbitrary points in time, emulation should feel relatively free of risk;
however, the point about stubbing dependencies will become apparent. If
you feel the need to start over, there are two methods: First, you can
end the emulation session and restart it. To end the session, close the
“Emulate termmines” tab in the Dynamic Listing window. You can then
restart by right-clicking the first instruction as before. Second, you
can use CTRL-G to go to
snapshot 0. This method is not as clean as the first, because the trace
will retain its scratch snapshots.
Press  Resume to let the emulator run until it crashes. It
should crash pretty quickly and without much ceremony:
Resume to let the emulator run until it crashes. It
should crash pretty quickly and without much ceremony:
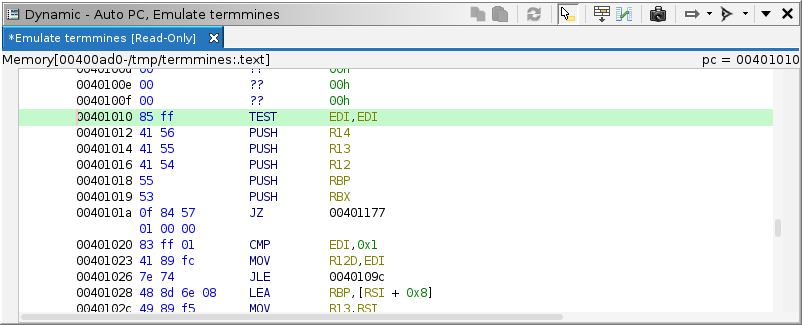
In this case, the clearest indication that something has gone wrong
is in the top-right of the Dynamic Listing. Recall that the location
label is displayed in red when the program counter points outside of
mapped memory. Presumably, the crash was caused by the instruction to be
executed next. To get details about the error, press Step
Into. This should display an error dialog with a full trace of
the crash. In this case, it should be an instruction decode error. When
the emulator reads uninitialized memory, it will get stale 0s; however,
when the emulator tries to execute uninitialized memory, it
will crash. Most likely, the target called an external function, causing
the program counter to land in the fake EXTERNAL block.
To diagnose the crash, press Step Back. After a couple
steps back, you should be able to confirm our hypothesis: we got here
through a call to the external function printf. You can
continue stepping back until you find the decision point that took us
down this path. You should notice it was because param_1
was 0. The decompiler can help you recognize that at a glance, but you
will still want to use the disassembly to get at precisely the deciding
instruction. The JZ (or other conditional jump) is too
late; you need to step back to the TEST EDI,EDI (or
similar) instruction. (This may, ironically, be the first instruction of
the function.) In the System V AMD64 ABI (Linux x86-64 calling
conventions) RDI is used to pass the first parameter. You
can hover your mouse over param_1 in the Decompiler, and it
will tell you the location is EDI:4, and that its current
value is a stale 0.
Initializing Other State
We had just started executing the target function arbitrarily. Ghidra takes care of a minimal bit of initialization of the trace to start emulation. Namely, it maps the image to its preferred base. It allocates space for the main thread’s stack and initializes the stack pointer. Finally, it initializes the program counter.
It is still up to you to initialize any other state, especially the
function’s parameters. Clearly, we will need to initialize
param_1. We may need to do a little static analysis around
the call to this function to understand what those parameters are, but
you could probably make an educated guess: param_1 is
argc and param_2 is argv. We
might as well initialize both. Luckily, we have plenty of memory, and
given the small scope of emulation, we can probably place the strings
for argv wherever we would like.
You may prefer to apply patches to the trace database or to the emulator. The advantage to patching in the emulator is that once you have completed your experiments, you can readily see all of the steps that got you to the current machine state, including all patches. The disadvantage is that if you have extensive patches, they will pollute the stepping schedule, and things can get unwieldy.
Alternatively, you can perform the patches in the trace. When you launched the emulated target, all Ghidra really did was initialize a trace database. The advantage to patching the trace is that once you have completed your experiments, you will have your initial state captured in a trace snapshot. The disadvantage is that you will need to remember to invalidate the emulator cache any time you change the initial state. For this tutorial, we will perform the patches in the emulator.
NOTE: If you wish to try patching the trace, then change to Control Trace mode and use the Navigate backward one snapshot control action that appears, so that you are patching the initial state, and not a scratch snapshot. Scratch snapshots are ephemeral snapshots in the trace used to display emulated state. Changes to these snapshots will affect the display, but will not affect subsequent emulation. If your current schedule includes any steps, then Control Trace is patching a scratch snapshot.
Now, we will manually “allocate” memory for argv.
Luckily, Ghidra allocated 16K of stack space for us! The target function
should not need a full 16K, so we will allocate the lowest addresses of
the stack region for our command-line arguments. If you prefer, you may
use the Add Region action in the Regions window to
manually fabricate a heap region, instead. In the Regions window, filter
for “stack” and take note of the start address, e.g.,
00001000. We will use the Watches window to perform our
patching, though we will also use the Dynamic Listing to double check.
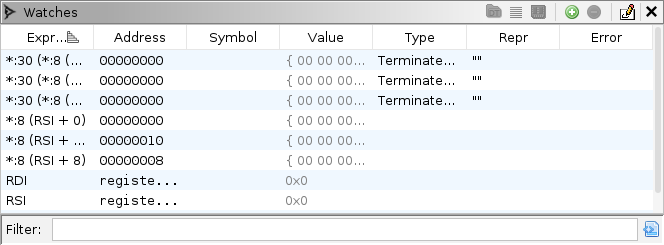
Add the following watches:
RSP— to confirm the stack pointer is far fromargv.RDI— the location ofparam_1, i.e.,argc.RSI— the location ofparam_2, i.e.,argv.
To start, we will just try to return successfully from the parser.
From the behavior we have observed, it requires at least
argv[0] to be present. Conventionally, this is the name of
the binary as it was invoked from the shell, i.e.,
termmines. There are few reasons a UNIX program might want
to examine this “argument.” First, if the binary actually implements
many commands, like busybox does, then that binary needs to
know the actual command. Second, if the binary needs to print usage
information, it may like to echo back the actual invocation. It is
possible we may only need to initialize argc, since the
parser may not actually use the value of
argv[0].
Use the Watches window to set RDI to 1, then click Resume.
Like before, the emulator will crash, but this time you should see “pc =
00000000” in red. This probably indicates success. In the Threads
window, you should see a schedule similar to
0:t0-{RDI=0x1);t0-16. This tells us we first patched RDI,
then emulated 16 machine instructions before crashing. When the parser
function returned, it probably read a stale 0 as the return address, so
we would expect a decode error at 00000000. Step backward
once to confirm this hypothesis.
Stubbing External Calls
For this tutorial, we will set the skill level to Advanced by
patching in actual command-line arguments. This continues our lesson in
state initialization, but we may also need to stub some external calls,
e.g., to strnlen and strcmp. We will need to
pass in termmines -s Advanced, which is three arguments.
Use CTRL-G to go back to
snapshot 0, and add the following watches:
*:8 (RSI + 0)— the address of the first argument, i.e.,argv[0].*:30 (*:8 (RSI + 0))with typeTerminatedCString— at most 30 characters of the first argument.*:8 (RSI + 8)—argv[1]*:30 (*:8 (RSI + 8))with typeTerminatedCString— contents ofargv[1]*:8 (RSI + 16)—argv[2]*:30 (*:8 (RSI + 16))with typeTerminatedCString— contents ofargv[2]
This will generate an extensive list of patch steps, so you may
prefer to patch the trace in this case. Set RDI to 3.
Notice that argv[0] is supposedly allocated at
00000000 according to the Address column for the watch on
*:8 (RSI + 0). That was determined by the value of
RSI, which is essentially telling us we need to allocate
argv, an array of pointers. We can confirm RSP
is at the upper end of the stack region, so we allocate
argv at 00001000. To do that, set the value of
RSI to 0x1000. You should see the Address
column update for some other watches. You can double-click any of those
addresses to go there in the Dynamic Listing.
NOTE: You do not have to allocate things in a listed region, but if you want to see those things in the Dynamic Listing, it is easiest if you allocate them in a listed region.
Now, we need to allocate space for each argument’s string. To ensure
we do not collide with the space we have already allocated for
argv, we should place a data unit in the Dynamic listing.
Double-click the Address 00001000 in the Watches window to
go to that address in the Dynamic Listing. Press
P then [
(left square bracket) to place a 3-pointer array at that address. We can
now see the next available byte is at 00001018.
NOTE: You might set the Dynamic Listing to Do
Not Track, otherwise it may seek back to the PC every time you
patch.
Now that we know where to put argv[0], we need to patch
it to 0x0001018. This should be the watch on
*:8 (RSI + 0). When you modify the Value column, you can
type either bytes (in little-endian order for x86) or the integer value
0x1018. That should cause the watch on
*:30 (*:8 (RSI + 0)) to get the address
00001018. Using the Repr column, set that watch’s value to
"termmines". (The quotes are required.) Place a string in
the Dynamic Listing using the '
(apostrophe) key. This shows us the next available address is
00001022, so repeat the process to allocate
argv[1] and set it to "-s". Then finally,
allocate argv[2] and set it to "Advanced".
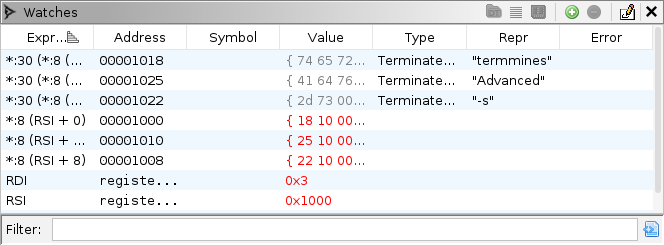
When you have finished, the Watches pane should look something like
this:
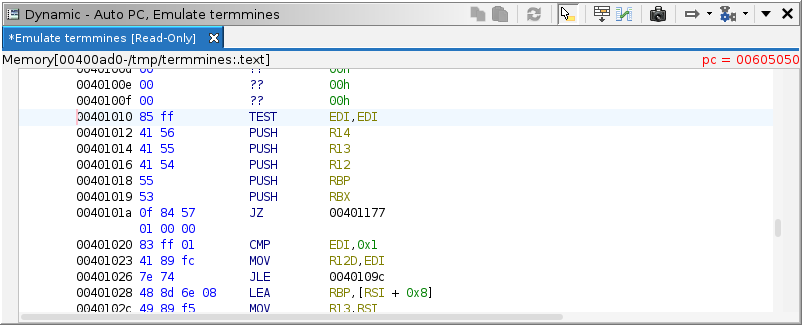
The Dynamic Listing should look something like this:
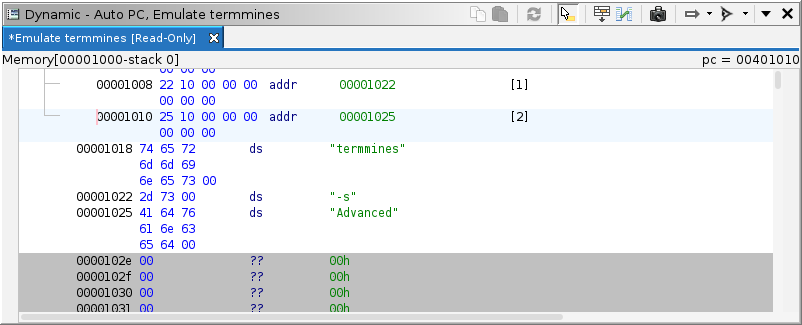
NOTE: The placement of data units is not necessary for the emulator to operate; it only cares about the bytes. However, it is a useful aide in devising, understanding, and diagnosing machine state.
Now, click
Resume, and see where the emulator crashes next.
Depending on your compilation of termmines, it may crash
after returning, or it may crash trying to call strnlen or
strcmp. If the program counter is 00000000,
then it returned successfully. This is unfortunate, because you no
longer have motivation to stub external calls.
If the program counter is not 00000000, then step
backward until you get to the CALL. There are at least
three techniques for overcoming this.
- You can skip the
CALLand patchRAXaccordingly. - You can override the
CALLinstruction using a Sleigh breakpoint. - You can override the call target using a Sleigh breakpoint.
Skip Technique
The skip technique is simplest, but will need to be performed
every time that call is encountered. Press Skip
Over, then use the Registers or Watches pane to patch
RAX. Then press Resume.
CALL Override Technique
Overriding the CALL is also fairly simple. While this
will handle every encounter, it will not handle other calls to the same
external function.
- Press
Kin the listing to place a breakpoint on theCALLinstruction. - Now, in the Breakpoints panel, right-click the new breakpoint and select Set Injection (Emulator).
- This is the fun part: you must now implement the function in Sleigh, or at least stub it well enough for this particular call.
Supposing this is a call to strnlen, you could implement
it as:
RAX = 0;
<loop>
if (*:1 (RDI+RAX) == 0 || RAX >= RSI) goto <exit>;
RAX = RAX + 1;
goto <loop>;
<exit>
emu_skip_decoded();While Sleigh has fairly nice C-like expressions, it unfortunately
does not have C-like control structures. We are essentially writing a
for loop. The System V AMD64 ABI specifies RAX is for the return value,
so we can just use it directly as the counter. RDI points to the string
to measure, and RSI gives the maximum length. We initialize RAX to 0,
and then check if the current character is NULL, or the count has
exceeded the maximum length. If so, we are done; if not, we increment
RAX and repeat. Finally, because we are replacing the semantics
of the CALL instruction, we tell the emulator to skip the
current instruction.
For the complete specification of Sleigh, see the Semantic Section in the Sleigh documentation. The emulator adds a few userops:
emu_skip_decoded(): Skip the current instruction.emu_exec_decoded(): Execute the current instruction.emu_swi(): Interrupt, as in a breakpoint.
Some control flow is required in the Sleigh injection, otherwise, the
emulator may never advance past the current instruction. An explicit
call to emu_exec_decoded() allows you to insert logic
before and/or after the original instruction; however, if the original
instruction branches, then the logic you placed after will not
be reached. An explicit call to emu_skip_decoded() allows
you to omit the original instruction altogether. It immediately falls
through to the next instruction. The emu_swi() userop
allows you to maintain breakpoint behavior, perhaps to debug your
injection.
After you have written your Sleigh code:
- Click OK on the Set Injection dialog.
- In the menus, select Debugger → Configure Emulator → Invalidate Emulator Cache.
- Click
Resume.
Stubbing any remaining external calls is left as an exercise. You are successful when the emulator crashes with “pc = 00000000”.
Clear or disable your breakpoint and invalidate the emulator cache again before proceeding to the next technique.
Target Override Technique
The target override technique is most thorough, but also the most
involved. It will handle all calls to the external function, e.g.,
strnlen, no matter the call site. If the call goes through
a program linkage table (PLT), then you are in luck, because the call
target will be visible in the Dynamic Listing. The PLT entry usually
contains a single JMP instruction to the actual
strnlen. For real target processes, the JMP
instruction will transfer control to a lazy linker the first time
strnlen is called from termmines. The linker
then finds strnlen and patches the table. In contrast, the
Ghidra loader immediately patches the table to point to a fake
<EXTERNAL>::strnlen symbol. The EXTERNAL
block is not visible in the Dynamic Listing, so we will override the
JMP in the PLT.
The Sleigh code is nearly identical, but we must code an x86
RET into it. Because we allow the CALL to
execute normally, we must restore the stack. Furthermore, we must return
control back to the caller, just like a real x86 subroutine would. We
also no longer need emu_skip_decoded(), because the
RET will provide the necessary control transfer.
RAX = 0;
<loop>
if (*:1 (RDI+RAX) == 0 || RAX >= RSI) goto <exit>;
RAX = RAX + 1;
goto <loop>;
<exit>
RIP = *:8 RSP;
RSP = RSP + 8;
return [RIP];Notice that we cannot just write RET, but instead must
write the Sleigh code to mimic a RET. As with the
CALL override technique, you must now invalidate the
emulator cache and resume. Stubbing any remaining external functions is
left as an exercise. You are successful when the emulator crashes with
“pc = 00000000”.
Wrapping Up
As you can see, depending on the scope of emulation, and the particulars of the target function, emulating a program image can be quite involved. Whatever technique you choose, once you have successfully returned from the command-line argument parser, you should check for the expected effects.
In the Static Listing, navigate to the variable that stores the board’s dimensions. (Finding that variable is a task in the Beginner portion, but it can be found pretty easily with some manual static analysis.) In the Dynamic Listing, you should notice that the values have changed to reflect the Advanced skill level.
Optional Exercise: Patch the Placement Algorithm
In this exercise, you will use emulation to devise an assembly patch
to termmines to change the mine placement algorithm.
Instead of random placement, please have them placed left to right, top
to bottom. We recommend you devise your patch using the Assembler
(Patch Instruction action) in the Static Listing, then
test and debug your patch using the Emulator. Perhaps patch the Dynamic
Listing to try quick tweaks before committing them to the Static
Listing. Once you have it, export the patched binary and run it outside
of Ghidra.
Debugging P-code Semantics
The last use case for emulation we will cover in this course is debugging p-code semantics. This use case is a bit niche, so we will not cover it too deeply. It is useful for debugging processor modules. It is also useful in system modeling, since a lot of that is accomplished using Sleigh p-code. Perhaps the most useful case related to this module is to debug Sleigh injections.
Ghidra has a dedicated panel for stepping the emulator one p-code operation at a time. This panel is not included in the default Debugger tool, so it must be configured:
- If you have not already, open the Debugger tool.
- In the menus, select File → Configure.
- Click the Configure All Plugins button in the top right of the dialog.
- Activate the
DebuggerPcodeStepperPlugin - Click OK
- Click Close
The stepper should appear stacked over the Threads panel in the bottom right. Yours will probably still be empty, but here is what it looks like populated:

To populate it, you will need a session, either emulated or connected to a back-end debugger. Use the buttons in the local toolbar to step p-code operations. The first p-code op of any instruction is to decode the instruction. Once decoded, the p-code listing (left panel) will populate with the ops of the decoded instruction. If the current instruction is overridden by a Sleigh breakpoint, the listing will populate with the injected ops instead. You can then step forward and backward within those. As you step, the other windows that display machine state will update.
In addition to registers and memory, p-code has unique variables. These are temporary variables used only within an instruction’s implementation. They are displayed in the right panel. The table of variables works similarly to the Registers pane. The columns are:
- The Unique column gives the variable’s name and size in bytes.
- The Bytes column gives the variable’s value in bytes.
- The Value column gives the variable’s value as an integer, an interpretation of the bytes in the machine’s byte order.
- The Type column allows you to assign a type. This is ephemeral.
- The Repr column gives the variable’s value according to the assigned type.
As you step, you may notice the schedule changes. It is displayed in the stepper’s subtitle as well as the Threads panel’s subtitle. P-code stepping is denoted by the portion of the schedule following the dot. NOTE: You cannot mix instruction steps with p-code op steps. The instruction steps always precede the p-code ops. If you click Step Into from the global toolbar in the middle of an instruction, the trailing p-code op steps will be removed and replaced with a single instruction step. In most cases, this intuitively “finishes” the partial instruction.